Kubernetes 上如何控制容器的启动顺序?
去年写过一篇博客:控制 Pod 内容器的启动顺序,分析了 TektonCD 的容器启动控制的原理。
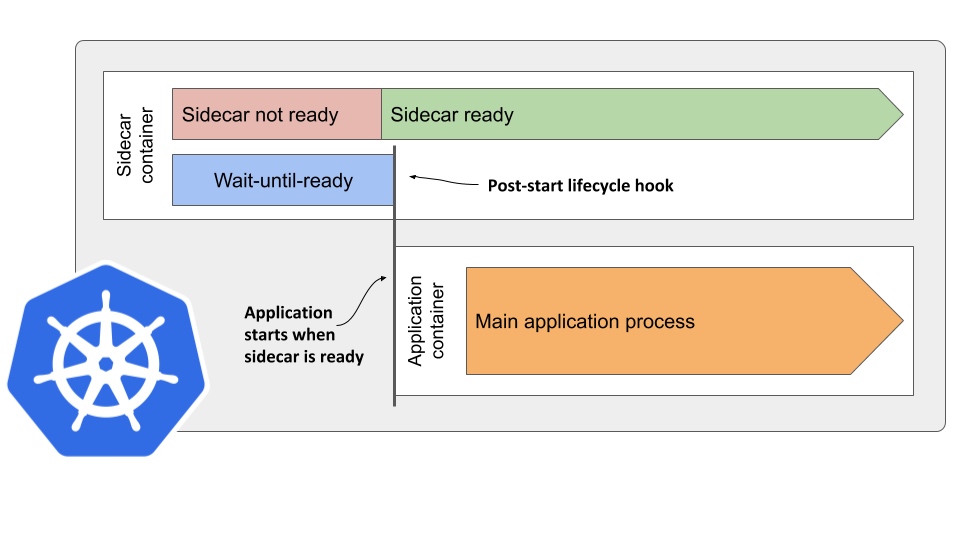
为什么要做容器启动顺序控制?我们都知道 Pod 中除了 init-container 之外,是允许添加多个容器的。类似 TektonCD 中 task 和 step 的概念就分别与 pod 和 container 对应,而 step 是按照顺序执行的。此外还有服务网格的场景,sidecar 容器需要在服务容器启动之前完成配置的加载,也需要对容器的启动顺序加以控制。否则,服务容器先启动,而 sidecar 还无法提供网络上的支持。
现实

期望
到了这里肯定有同学会问,spec.containers[] 是一个数组,数组是有顺序的。Kubernetes 也确实是按照顺序来创建和启动容器,但是 容器启动成功,并不表示容器可以对外提供服务。
在 Kubernetes 1.18 非正式版中曾在 Lifecycle 层面提供了对 sidecar 类型容器的 支持,但是最终该功能并没有落地。
那到底该怎么做?
TL;DR
笔者准备了一个简单的 go 项目,用于模拟 sidecar 的启动及配置加载。
克隆代码后可以通过 make build 构建出镜像,假如你是用的 minikube 进行的实验,可以通过命令 make load-2-minikube 将镜像加载到 minikube 节点中。
使用 Deployment 的方式进行部署,直接用 Pod 也可以。
apiVersion: apps/v1
kind: Deployment
metadata:
creationTimestamp: null
labels:
app: sample
name: sample
spec:
replicas: 1
selector:
matchLabels:
app: sample
strategy: {}
template:
metadata:
creationTimestamp: null
labels:
app: sample
spec:
containers:
- image: addozhang/k8s-container-sequence-sidecar:latest
name: sidecar
imagePullPolicy: IfNotPresent
lifecycle:
postStart:
exec:
command:
- /entrypoint
- wait
- image: busybox:latest
name: app
imagePullPolicy: IfNotPresent
command: ["/bin/sh","-c"]
args: ["date; echo 'app container started'; tail -f /dev/null"]
下面的截图中,演示了在 sample 命名空间中,pod 内两个容器的执行顺序。
Kubernetes 源码
在 kubelet 的源码 pkg/kubelet/kuberuntime/kuberuntime_manager.go 中,#SyncPod 方法用于创建 Pod,步骤比较繁琐,直接看第 7 步:创建普通容器。
// SyncPod syncs the running pod into the desired pod by executing following steps:
//
// 1. Compute sandbox and container changes.
// 2. Kill pod sandbox if necessary.
// 3. Kill any containers that should not be running.
// 4. Create sandbox if necessary.
// 5. Create ephemeral containers.
// 6. Create init containers.
// 7. Create normal containers.
func (m *kubeGenericRuntimeManager) SyncPod(pod *v1.Pod, podStatus *kubecontainer.PodStatus, pullSecrets []v1.Secret, backOff *flowcontrol.Backoff) (result kubecontainer.PodSyncResult) {
...
// Step 7: start containers in podContainerChanges.ContainersToStart.
for _, idx := range podContainerChanges.ContainersToStart {
start("container", containerStartSpec(&pod.Spec.Containers[idx]))
}
return
}
在 #start 方法中调用了 #startContainer 方法,该方法会启动容器,并返回容器启动的结果。注意,这里的结果还 包含了容器的 Lifecycle hooks 调用。
也就是说,假如容器的 PostStart hook 没有正确的返回,kubelet 便不会去创建下一个容器。
// startContainer starts a container and returns a message indicates why it is failed on error.
// It starts the container through the following steps:
// * pull the image
// * create the container
// * start the container
// * run the post start lifecycle hooks (if applicable)
func (m *kubeGenericRuntimeManager) startContainer(podSandboxID string, podSandboxConfig *runtimeapi.PodSandboxConfig, spec *startSpec, pod *v1.Pod, podStatus *kubecontainer.PodStatus, pullSecrets []v1.Secret, podIP string, podIPs []string) (string, error) {
...
// Step 4: execute the post start hook.
if container.Lifecycle != nil && container.Lifecycle.PostStart != nil {
kubeContainerID := kubecontainer.ContainerID{
Type: m.runtimeName,
ID: containerID,
}
msg, handlerErr := m.runner.Run(kubeContainerID, pod, container, container.Lifecycle.PostStart)
if handlerErr != nil {
m.recordContainerEvent(pod, container, kubeContainerID.ID, v1.EventTypeWarning, events.FailedPostStartHook, msg)
if err := m.killContainer(pod, kubeContainerID, container.Name, "FailedPostStartHook", reasonFailedPostStartHook, nil); err != nil {
klog.ErrorS(fmt.Errorf("%s: %v", ErrPostStartHook, handlerErr), "Failed to kill container", "pod", klog.KObj(pod),
"podUID", pod.UID, "containerName", container.Name, "containerID", kubeContainerID.String())
}
return msg, fmt.Errorf("%s: %v", ErrPostStartHook, handlerErr)
}
}
return "", nil
}
实现方案
cmd/entrypoint/wait.go#L26 (这里参考了 Istio 的 pilot-agent 实现 )
在 PostStart 中持续的去检查 /ready 断点,可以 hold 住当前容器的创建流程。保证 /ready 返回 200 后,kubelet 才会去创建下一个容器。
这样就达到了前面截图中演示的效果。
for time.Now().Before(timeoutAt) {
err = checkIfReady(client, url)
if err == nil {
log.Println("sidecar is ready")
return nil
}
log.Println("sidecar is not ready")
time.Sleep(time.Duration(periodMillis) * time.Millisecond)
}
return fmt.Errorf("sidecar is not ready in %d second(s)", timeoutSeconds)
